Mugendai(無限大)
昆虫の持つ驚異の知能を技術で生かす――生物が進化で獲得した能力を活用して、持続可能な地球を
2019年10月3日
カテゴリー Mugendai(無限大)
記事をシェアする:
オスのガ(蛾)が、メスの出すフェロモンの匂いをどこまでも追って行く――ファーブル「昆虫記」の中の有名な実験である。
それから120年。東京大学先端科学技術研究センター所長の神崎亮平教授のチームは、昆虫が進化により獲得した知能(生物知能)を再現して活用するため、カイコガの脳の精密な神経回路モデルをスーパーコンピューターに再現した。そして昆虫自身が操縦するロボットや、脳が作り出す信号でフェロモンを追うロボット「サイボーグ昆虫」を作り出した。
昆虫の脳は、人の100万分の1しかない。にもかかわらず、何kmも離れた匂いに向かってまっしぐらに素早く行動する。移動中に衝突をすることもない。その驚きの能力を生かそうというわけだ。神崎教授らはさらに、昆虫が持つ匂いを検出する触角のしくみを再現することにより、特定の化学物質を検出しそれを探し出すカイコガ「警察昆虫」や、特定の匂いを検出するとピカッと光る細胞「センサー細胞」を遺伝子工学の技術を活用して開発を進めている。
「昆虫はきわめて省エネで、高効率な問題解決能力を何億年もの進化の過程で獲得しました。AIでも難しいことを、本能的に簡単にやってのけます」と言う。こうした私たちがまだ知らない、進化のなかで獲得されてきた昆虫の能力の活用は、人にも環境にもよりやさしい「課題解決の方法」の宝庫だ。SDGs (持続可能な開発目標)にもかなう発想である。このようなアプローチは、これまでにない新しいモノづくりの方法になるだろう。
さまざまな可能性に挑戦する神崎教授に、私たちが知らない驚異の昆虫の能力と、今後の研究開発の方向、展望などについて伺った。
目次

(かんざき・りょうへい)
東京大学先端科学技術研究センター所長/教授。
●専門は、神経行動学。カイコガのフェロモン源探索行動の研究や、昆虫制御型ロボット(サイボーグ昆虫)、スーパーコンピューターによる大規模脳シミュレーションなどで知られる世界的な生物学者。
●経歴: 和歌山県橋本市出身。1986年筑波大学大学院生物科学研究科博士課程を修了。 アリゾナ大学神経生物学研究所博士研究員、筑波大学生物科学系助手、講師、助教授を経て、2003 年同大学教授。2004 年より東京大学大学院情報理工学系研究科教授、2006 年より東京大学先端科学技術研究センター教授。
2016 年より東京大学先端科学技術研究センター所長。2019 年ミラノ・ビコッカ大学名誉学位。
●受賞: 日本比較生理生化学会学会賞、日本ロボット学会論文賞、日本神経回路学会最優秀研究賞、JSPS ひらめき☆ときめきサイエンス推進賞、橋本市文化賞など受賞多数。
昆虫はヒトの100万分の1の脳で情報処理し、素早く行動する
――先生は、「昆虫研究によって『新しい価値』を見出す」と述べておられます。昆虫の「新しい価値」とはどのようなものでしょうか。
神崎 地球上に生息する生物は約180万種で、ヒトはそのうちの1種です。全体の50%を超える100万種が昆虫で、地球上のさまざまな環境で生息し、そこでの課題を解決して生きています。
彼らが進化の過程で身に付けた能力は実に豊富です。例えば、ガはメスの出すフェロモンという匂いを遠くから検知して探索します。ハチは仲間同士で顔認識をします。コオロギは1度けんかして負けた相手とは2度とけんかしません。個体識別ができるわけです。ショウジョウバエやトンボは、高速で群れて飛び回っても衝突しません。視力は0.01以下、立体視もできないにも関わらずです。
こうした昆虫が、いったい環境下のどのような情報を使って、どのように処理し、そのような能力が生まれるかは重要で、われわれがまだ知らない環境下の情報を使っていることが多く、新しい価値をそこに見出すことができます。これを人や環境に優しい新しいモノづくりに活用することができるわけです。
昆虫に着目する大きな理由は、その能力を生み出す脳のサイズです。ヒトの脳の神経細胞(ニューロン)は約1000億個ありますが、昆虫は100万分の1の10万個ほどしかありません。さまざまな環境下の情報を1㎜にも満たないような小さな脳で情報処理をして素早く行動することです。
高度に進化した生物ほど脳の構造が複雑になり、そのしくみを解析するのは大変ですが、昆虫の脳のサイズですとスパコン上に神経回路を精密に再現することも、さらには最新の遺伝子工学により神経回路を精密に分析することもできるようになり、脳をニューロン1つ1つから再構築できるようになってきました。昆虫の不思議な能力を再現して使える時代を迎えたわけです。
――カイコガを生物知能の研究対象に選ばれた理由は何でしょうか。
神崎 カイコは絹を作るので、「おかいこさん」といって昔から身近な存在でした。1970年代まではカイコを飼育する養蚕農家が全国にたくさんありました。また、遺伝学の研究では、日本特有の材料でした。カイコガ(写真1)はボンビコールという名前の付いたフェロモンの匂いが触角で受容されると反応し、完璧に行動するという性質があります。ボンビコール1種類の刺激だけで行動が起こるので、動物が行動を起こす感覚や脳のしくみを明らかにするうえで優れたモデルになるのです。このフェロモンが最初に発見されたのはカイコガで、ドイツのノーベル賞学者が1959年に化学構造を決定しました。
高校の生物の教科書では、動物の行動のしくみを学ぶ理科実験にカイコガを使うことが勧められています。高校の先生と協力をして、カイコガが行動する時の神経や筋肉から出る電気信号を計る装置を3000円くらいで作るプロジェクトを始めています。全国の高校に広めていきたいと考えています。ぜひ支援を願いします。

写真1:オスのカイコガ 写真提供:神崎亮平所長
昆虫が生きる環境世界は、ヒトとは異なる
――先生は昆虫の環境世界(脳内に構築される外界の世界)は、ヒトとは異なると述べておられます。具体的にどのように違うのか、なぜそういう現象が起きるのでしょうか。
神崎 環境世界の違いを「感覚」「時間」「大きさ」の3つに分けてお話ししましょう。
まず「感覚」ですが、昆虫の目は複眼で、視力は0.01以下しかありません。さらに眼の構造上、私たちのようには立体視ができません。目が悪くて、立体視もできないような世界でありながらも、飛んでいる虫を自分も飛びながら捕らえ、障害物をサッと避けることができるのです。
逆に私たちが検知できない偏光を見ることができます。偏光は青空ではあるパターンで分布します。昆虫はこのパターンから、たとえ太陽が雲間に隠れて見えなくても、その方向がわかります。この能力によって、太陽と巣箱と餌場の関係から、自分の巣やエサ場に飛んで行くことができます。
「色」はどうかというと、ヒトは青から赤までの色を見分けますが、昆虫は私たちが色としては見えない紫外線も色として見ています。黄色い菜の花は、紫外線が見えるフィルターを通してみると、中心の蜜がある部分が黒く見えます。昆虫は特に複雑な情報処理をしなくても蜜のありかがわかるのです。AIの助けは必要なく、生まれながらにそのような機能を進化の中で身に付けたわけです。モンシロチョウのはねは、私たちの目にはオスもメスも白く見えますが、同様に紫外線が見えるフィルターを通して見ると、オスのはねは真っ黒、メスは真っ白です。彼らにとってオス、メスの区別は一目瞭然なのです。
「時間」については、光が毎秒50回以上点滅するとヒトは区別できませんが、ミツバチはなんと300回以上の点滅を区別できます。ミツバチは1秒間に250回程度、ブーンと羽ばたきますが、羽ばたきの1回1回が、お互いに見えている可能性があります。群がっていても衝突しないのは、そのような高速な視覚の情報処理によると考えられます。このようなしくみはクルマの衝突回避にぜひ使ってもらいたいです。
「大きさ」ですが、体長が小さくなると、表面積は2乗(たてxよこ)、体積は3乗(たてxよこxたかさ)で小さくなります。このため、体積に対する面積の割合は身体が小さいほど大きくなります。すると、面で効く力、摩擦力や空気の粘性力は、相対的に大きくなります。体長1mmのショウジョウバエにとって、空気はネバネバしたものになります。ハチミツの中にドボンと浸かっているような感じです。
私たちを取り囲む外界(環境)にある物理化学的な信号はもちろん同じですが、ひとたびその信号が生物によって感知されると、生物によって感覚器(センサー)の性能が違うので、検出できた信号を使って脳の中につくられた外界の世界(環境世界)は、生物によって異なってくるのです。生物にとっての環境世界は生物の種類によってそれぞれ異なり、ヒトとはだいぶ違うのです。
生物は外界からそれぞれの生物にとって重要な情報を、その生物が持つ独自のセンサーを使って検出し、脳で処理をして行動します。繰り返しになりますが、環境下にはまだわれわれが知らない情報が潜んでいるわけで、自然がつくり上げてきた価値を生物から見出すことができるのです。

科学技術は、AIの次の知能である生物知能を生かすこと
――カイコガはフェロモンに瞬時に反応して行動を開始します。脳内ではどのような情報処理が行われているのでしょうか。ヒトとの違いを説明していただけますか。
神崎 カイコガのメスのフェロモンはお尻の先にあるフェロモン腺でつくられます。そこから放出されたフェロモン(ボンビコール)が風の流れに乗ってオスの触角に届くと、触角にある匂いセンサーにとらえられます。ボンビコールに反応するセンサーには、ボンビコールのみに結合するボンビコール受容体というたんぱく質があります。ボンビコールが受容体と結合すると受容体を通してセンサー内にCaイオンが流れ込み、センサーが信号(活動電位)を発生します。その信号が脳に流れ、さまざまな処理がなされ、最終的に前運動中枢という特別な場所に伝えられます。この場所にある神経回路でカイコガがフェロモンを探し出す行動を起こす命令が作られ、胸部や腹部に伝わり、あしやはねが適切に動くわけです。
脳のしくみはどの生物も基本的に3つのしくみからできています(図1)。1つ目は、生まれながらに持っている生得(本能)的な行動を起こす命令を作るしくみ(第1階層)、2つ目が、情動・記憶行動を起こすしくみ(第2階層)、3つ目が特に人に特徴的ですが、認知など高度な行動を起こすしくみ(第3階層)です。
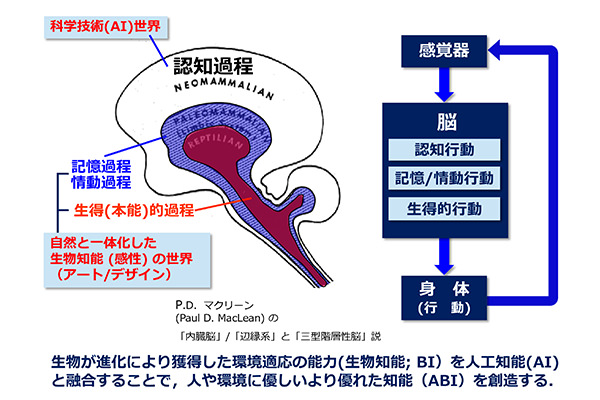
図1:生物の脳の基本的な構造図 資料提供:神崎亮平所長
昆虫の場合、脳のしくみは比較的簡単で、第1と第2階層が中心となります。カイコガの匂い源探索の行動もこれらのしくみによって起こります。一方、ヒトの脳は第3階層がとても発達しており、推論や未来予測、計算をするのが得意なわけです。
現在盛んに行われているAIは「脳のしくみを模している」と言われますが、主に第3階層を対象にしていると思います。片や、生物が進化の過程で環境との相互作用により磨き上げられたのが第1、第2階層ですが、この階層はAIは対象にはしていないようです。
重要なことは、これまでの科学技術はこの第3階層が生んできた、課題に対して最適な解を求めるというものです。そしてその恩恵により現在の人類の発展があるわけです。しかし、最適解を求めるがゆえに、人類が生んだ科学技術がさまざまな格差や自然環境に悪影響を与えてきたことも否めません。一方で、第1、第2階層による問題解決法は、人以外の多くの動物が使用してきた方法で、自然と一体化した進化により獲得された手法です。ヒトは第3階層が発達した結果、自然界から乖離した生き方を選択したとも言えます。私はそこに現代の科学技術の課題があると思っています。頭(脳)で考えて最適な答えを出すだけではなく、長い進化の中で獲得してきた本能的な課題解決法をもっと活用する必要があると考えています。それに応えてくれるのが、地球上のあらゆる環境下で生息し、環境下で起こるさまざまな課題を本能的に解決する昆虫なわけです。その解決法は、人や環境に優しい手法を提供してくれると思います。
――先生が開発された「昆虫操縦型ロボット」や「サイボーグ昆虫」は、世界を驚かせました。そのメカニズムを説明していただけますか。
神崎 「昆虫操縦型ロボット」(写真2)は、空気で浮上しているボールの上にオスのカイコガを乗せ、カイコガ自身に移動ロボットを操縦させる装置です。このようなロボットを使って、昆虫がどれくらいの能力(生物知能といってよいと思いますが)を持っているかを試したのです。
ロボット上のカイコガがフェロモンを検知して動きだすと、玉乗りのようにボールが前後左右に動くので、回転を光学センサーで計測して、その信号でロボットを動かします。するとロボットはカイコガが動いたのと同じように動くわけです。カイコガはロボットを操縦して見事にフェロモン源にたどり着きます。
これまでのロボットは想定外のことが起こるとよく止まってしまいますが、そのような状況下で、生物であるカイコガはどれくらいの能力(生物知能)を発揮するかを次に調べてみました。このロボットの片方の車輪の回転速度をもう一方の4倍に設定して同じ実験をするわけです。この状態ではたとえカイコガはまっすぐ歩いても、ロボットはぐるぐると回ってしまい、カイコガにとっては想定外の動きが起こります。このような異常な動きがロボットに起こった時、カイコガはどのように判断しロボットを動かすかを試したのです。
なんとカイコガはロボットの異常な動きを複眼を使って察知し、ロボットの異常な動きをリアルタイムで補正しながら、匂いの源を突き止めたのです。このロボットは世界中で有名になりました。大きさわずか1mmの脳でこれだけ難易度が高い仕事をこなしている。まさに「昆虫、恐るべし!」です。このような能力は、昆虫のセンサーや脳の働きで起こります。昆虫のセンサーや脳のしくみを再現してロボットに搭載すれば、かなり賢いロボットができることになるわけです。

写真2:昆虫操縦型ロボット 写真提供:神崎亮平所長
カイコガの匂いを探す命令は脳で作られます。脳で作られたどの信号が匂い源探査の命令かを調べるために、命令を運ぶニューロンの信号を記録して、その信号で動くロボットを作りました。これを「サイボーグ昆虫」(写真3)と呼んでいます。カイコガの匂いセンサーである触角と脳がある頭の部分だけをロボットに載せ、身体は移動ロボットと置き換えたわけです。このような脳の信号で動く「サイボーグ昆虫」を使うことにより、脳で作られたどのような命令が匂い源探索の命令であるかが明らかになったのです。後でも述べますが、この命令は脳内の神経回路により作られます。その回路を明らかにし、その神経回路モデルで移動ロボットを動かせば、これまで誰も達成していない匂い源探索ロボットができることになります。
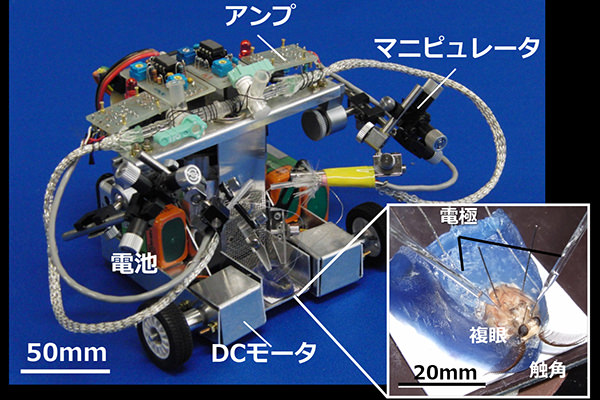
写真3:サイボーグ昆虫 写真提供:神崎亮平所長
空港で違法薬物を検知する「警察昆虫」
――こうした昆虫の嗅覚の能力を生かした「警察昆虫」、「センサー細胞」について説明していただけますか。
神崎 特定の匂いを検出し、その発生源を探し出すことは非常に重要です。例えば、被災地で生き埋めになっている被害者の救出、爆発物、麻薬などの検出は、安全安心にかかわる重要な仕事です。ただ、現状は、そのような特定の匂いを高感度で検出できる工学的なセンサーはなく、さらには昆虫のように匂い源を探索するような優れたアルゴリズムもない状況です。そのような状況下で昆虫の嗅覚能力が注目され、昆虫の匂いセンサーや脳のしくみを再現する研究が急速に展開しています。その背景には、遺伝子工学やスーパーコンピューターなどの長足の発展があります。
先ほど言いましたように、カイコガの触角にはフェロモン(ボンビコール)に反応する匂いセンサー(ボンビコール受容体)があり、このセンサーがボンビコールを検出すると匂い源探索行動が起こります。
そこで、もしこのセンサーをボンビコール以外の特定の匂いに反応するように変えることができれば、特定の匂いをフェロモンだと思って探し出すカイコガができることになります。そのような技術が、遺伝子工学により可能になったのです。こうした改変を行ったカイコガを「警察昆虫」と呼んでいます。2011年に最初の「警察昆虫」を作ることに成功しました。コナガというカイコガとは違うガのフェロモンの匂いを検出する嗅覚受容体がわかったので、その受容体をカイコガに導入した「警察昆虫」を作りました。するとカイコガは、見事にコナガに反応し、それを探し出したのです。
夏場、水道水のカビ臭が大きな社会問題になりますが、これは水源であるダム湖などに発生するアオコ(微細藻類)が原因で、それが発するジオスミンという匂いが、カビ臭の要因の1つになっています。ジオスミンだけに反応する嗅覚受容体を持つカイコガの作出にも成功しました。高額な分析機器より感度が良いこともわかりました。
警察昆虫は将来的には、国際空港などでの違法薬物の検出に使えるかもしれません。違法薬物を隠し持った人がやって来ても、その薬物に反応するカイコガを遺伝子改変で作れば、その人物を特定することも可能になるでしょう。このような物質の計測機器は非常に高額ですが、警察昆虫ですと1匹5円ほどですみます(笑)。警察犬と警察昆虫が共同作業する日がくるかもしれません。
また、遺伝子工学技術を使えば、特定の匂いに反応する嗅覚受容体を細胞に導入し、特定の匂いを検出するとピカッと光る匂いセンサー、これを「センサー細胞」と言いますが、そのようなセンサーを作ることもできるようになりました。このセンサー細胞を利用した簡易検出キットは現在、製作を急いでいるところです。
生物が進化の中で獲得した問題解決法をモノ作りに生かす
――スーパーコンピューターに昆虫の神経回路モデル(写真4)を構築しておられますが、脳が再現できるのは驚きです。
神崎 昆虫の脳は1㎜くらいと小さいので、顕微鏡を使って脳全体を見ることができます。微分干渉顕微鏡といって、脳内の構造をコントラストを上げてみることのできる顕微鏡がありますが、それを使ってカイコガの脳を見ると、神経細胞(ニューロン)の細胞体という場所が1つ1つ観察できます。そこで、目的とするニューロンを決めて、それ目指して直径が1万分の1ミリのごく細いガラス電極を刺して、そのニューロンから反応を計測し、電極に入れた色素を注入することで、形を調べることができます。そのような1つ1つのニューロンの情報をデータベースに登録しています。これまでに約1600個のニューロンの情報が登録されました。そして、そのデータを使って、1つ1つのニューロンから神経の回路を、ジグソーパズルを組み上げていくようにして再現していきます。
ニューロンは非常に複雑な形をしており、たくさんの個所(シナプス)でつながっているので、神経回路はものすごく複雑な構造になります。そのような複雑な神経回路の働きをシミュレーションするには、膨大なデータをリアルタイムで処理できるスーパーコンピューターが必要になってきます。
そこで私たちはこのような複雑なニューロンの形を再現した神経回路のシミュレーションを行うプラットフォームをスーパーコンピューターに作りました。世界最速レベルでのシミュレーションができるプラットフォームを私たちの研究室で構築したのです。
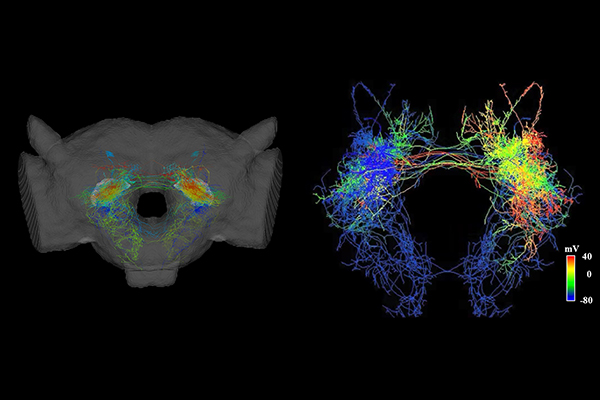
写真4:スーパーコンピューターに再現した神経回路モデル 写真提供:神崎亮平所長
昆虫の脳をニューロン1つ1つから再構築し、シミュレーションを通して、機能を理解する。また、その神経回路のモデルによってロボットを動かすことになります。これまで、匂い源探索を行うロボットを制御するアルゴリズムは、人が考え、トップダウンで作成していました。ところが、複雑に変化する環境下で匂いがどのように分布しているかもわからないなかでは、そのような手法はうまくいきませんでした。AIにそれを解決させようにも、匂いのセンサーがないので、適切なデータを与えることができず、たとえAIでもその解を出すことは難しいわけです。
一方、すでにご紹介してきたように、昆虫は特定の匂いを検出し、数キロにわたる匂い源探索を実現しています。また、私たちの研究から、昆虫の匂い源探索を行う命令をつくる神経回路も明らかになってきました。また、そのような神経回路を個々のニューロンから再現し、スパコンでシミュレーションすることもできるようになってきました。そのような結果から得られた、あるいは推定した神経回路モデルをロボットに搭載することで、昆虫のように匂い源探索ができるロボットが誕生しようとしています。このようにこれまで人が考えた方法ではなく、進化の中で獲得された生物知能を使って、われわれの課題解決に利用する工学があってよいと考えています。
前述しましたが、第1、第2階層のしくみを再現し、それを活用する新しい工学が、生物学、遺伝子工学、情報学、ロボット工学の融合から始まろうとしているのです。このような手法は、人にも環境にもより優しいものになると考えています。

アートやデザインも包含した異分野融合を進める
――先生の研究には神経科学、遺伝子工学、コンピューター、ロボットなど多彩な専門家が参加しておられます。先端研で生み出される異分野融合について、お考えをお聞かせください。
神崎 先端研は32年前に設立されましたが、設立の目的は、人と社会の安寧のための新しい科学や技術の新領域を開拓することにあります。言い方を変えれば、これから先の人や社会の在り方、ビジョンを常に考え、その実現のためにチャレンジを続けることにあります。その実現のため、工学、情報学、理学、医学などの理系、社会科学などの文系、さらにはバリアフリー分野を1つの研究所に集約させるという奇抜な発想のもと設立され、わが国を代表する学際的な研究所のさきがけとなっています。
最先端の科学や技術に日々接する中、最適な解を求めるこれまでの科学や技術の在り方に少々違和感を持ち始めています。多様な人々が暮らす中で、最適な解は確かに一部の人を幸せにするかもしれませんが、多くの幸せからは遠くなります。2030年を目指した持続可能な開発目標(SDGs)が、No one left behind(誰一人取り残さない)を理念として国連から提出されました。
もちろんこれまでの科学技術の恩恵により、現在の人類の発展があることも事実です。しかし一方で、最適解を求めるがゆえに、人類が生んだ科学技術がさまざまな格差や自然環境に悪影響を与えてきたことも否めません。多様な人や複雑な自然との太刀打ちは容易ではなく、その限界があらわになってきたのです。これまでの科学技術をいかにして多様な人々、さらには社会(インクルーシブな社会)の安寧に貢献できるように軌道修正するかは大きな課題です。
これまでの科学技術が多様な解を出せなかった理由の1つに感性の問題があると考えています。科学技術は人の思考により作られたものです。別の言い方をすれば、頭、脳で考え出されたものです。すでに述べましたが、“脳”というのはいくつかの働きを持っています。記号や言語を使って、まさに科学技術をつくりあげることができる働きが1つです(第3階層)。
あと1つは、言語化あるいは数式などで記述する記号化は難しいのですが、アートなど感性の働きがあります(第2、第3階層)。別な言葉で言えば、生まれながらに私たちに備わった生物としての働き、さらに言うと、生物の長い進化の中で環境との関係において築き上げられた働きです。人はこの2つの働きが適切なバランスで融合することで、日々の生活を営んでいます。それにより多様な人々そして社会が築かれているわけです。従って、科学技術の脳だけを使って多様性から生まれる課題を解決することは必然的に難しくなります。また、昨今、科学技術における倫理問題が取りざたされますが、これも科学技術を生む脳だけではなく、感性の視座、本来の人としての在り方の視座から再考する必要があると思います。
先端研では、アートあるいはデザインといった感性の視座を科学や技術に取り入れるとともに、そのような精神性・倫理性をもって、多様な人々・社会から生まれる課題解決にチャレンジしています。このような背景の中、先端研内に「インクルーシブデザインラボ」を設置しました。多様な人々と社会をつなぎ、誰もが活躍できるサステイナブルな社会の構築に先端研の研究環境や人的ネットワークを最大限に活用しチャレンジしていくラボです。
私の研究も、まさに自然が進化の過程で作り上げ、生まれながらにして備わった生物知能を再現して生かす研究ですが、先端研の運営にあたってもそのような考えが根本にあり、それが私を後押ししてくれているのです。

TEXT:木代泰之
※日本IBM社外からの寄稿や発言内容は、必ずしも同社の見解を表明しているわけではありません。
女性技術者がしなやかに活躍できる社会を目指して 〜IBMフェロー浅川智恵子さんインタビュー
ジェンダー・インクルージョン施策と日本の現状 2022年(令和4年)4⽉から改正⼥性活躍推進法が全⾯施⾏され、一般事業主⾏動計画の策定や情報公表の義務が、常時雇用する労働者数が301人以上の事業主から101人以上の事業主 […]
Qiskit Runtimeで動的回路を最大限に活用する
私たちは、有用な量子コンピューティングのための重要なマイルストーンを達成しました: IBM Quantum System One上で動的回路を実行できるようになったのです。 動的回路は、近い将来、量子優位性を実現するため […]
Qiskit Runtimeの新機能を解説 — お客様は実際にどのように使用しているか
量子コンピューターが価値を提供するとはどういうことでしょうか? 私たちは、価値を3つの要素から成る方程式であると考えます。つまりシステムは、「パフォーマンス」、「機能」を備えていること、「摩擦が無く」ビジネス・ワークフロ […]